Przeczytaj
Co to jest żyroskop?
Żyroskop to urządzenie do pomiaru lub utrzymywania orientacji przestrzennej. Podstawą jego działania jest zasada zachowania momentu pędu. Wykorzystuje się je głównie do budowy kompasów żyroskopowych, czyli elektromechanicznych przyrządów nawigacyjnych. Jako samodzielne urządzenie żyroskop raczej nie znajduje dużego zastosowania, za to świetnie sprawdza się przy wspomaganiu pomiarów z innych czujników, na przykład akcelerometrów.
Akcelerometr, oprócz wskazania przyśpieszenia obiektu względem wybranej osi, daje możliwość określenia konfiguracji trzech osi: nachylenia (Pitch), przechylenia (Roll) oraz obrotu (Yaw). Praktycznie wyznaczenie tych osi jest możliwe za pomocą samego żyroskopu, jednak może okazać się niewystarczające.
Kolejny problem to wyznaczenie parametrów Pitch, Roll i Yaw za pomocą samego akcelerometru. Owszem, jest on w stanie w miarę dokładnie określić dwa pierwsze (oczywiście pod warunkiem, że obiekt się nie przemieszcza), natomiast zupełnie nie poradzi sobie z wyznaczeniem parametru Yaw. Właśnie dlatego najlepszym rozwiązaniem jest uwzględnienie pomiarów zarówno z akcelerometru, jak i z żyroskopu, który wyeliminuje błędy będące wynikiem ruchu.
Jednak pomimo zastosowania obu tych urządzeń wciąż problematyczny pozostaje parametr Yaw - powinno się go określać za pomocą magnetometru (kompasu), uwzględniając pomiary z akcelerometru. Ostatecznie najlepsze rezultaty uzyskamy przy zastosowaniu wszystkich trzech czujników.

Moduł MPU6050 to układ łączący 3‑osiowy żyroskop, 3‑osiowy akcelerometr oraz cyfrowy termometr. Ma on wbudowaną sprzętową jednostkę DMP (Digital Motion Processor), dzięki której możliwe jest przeliczanie danych uzyskanych ze wszystkich trzech czujników na konkretne położenie względem Ziemi, co z kolei pozwala odciążyć mikrokontroler.
Żyroskop może pracować w zakresach pomiarowych ±250°/s, ±500°/s oraz ±2000°/s. Moduł posiada również dodatkowy tryb ±1000°/s. Wartości te wyrażają prędkość kątową, która określa kąt zakreślany w jednostce czasu.
Cechy modułu:
pobór prądu przez żyroskop: 3.6 mA,
pobór prądu przez akcelerometr: 500 uA,
pobór prądu przez MPU: 250 uA,
komunikacja: magistrala I²C 400 kHz,
zakres pomiarowy żyroskopu: +/-250, +/-500, +/-1000, +/-2000 stopni na sekundę,
zakres pomiarowy akcelerometru: +/-2 g, +/-4 g. +/- 8 g, +/-16 g,
rozdzielczość: -bitowa dla każdej osi każdego czujnika,
szybkość pomiaru żyroskopu: od do Hz,
szybkość pomiaru akcelerometru: od do Hz,
szybkość pomiaru MPU: od do Hz,
programowalne wyjście przerwań informujące o poruszeniu urządzenia lub dokonaniu pomiaru.

Opis wyjść:
VCC – zasilanie,
GND – masa zasilania,
INT – wyjście przerwania (typu otwarty dren),
SCL – wejście sygnału zegarowego magistrali I2C,
SDA – sygnał danych magistrali I2C,
AD0 – wybieranie adresu układu na magistrali I2C (podłączony do GND adres 0x68 – podłączony do Vcc, adres 0x69),
XCL – wyjście sygnału zegarowego magistrali I2C do magnetometru,
XDA – sygnał danych magistrali I2C do magnetometru.
Jak działa akcelerometr?
Akcelerometr działa na zasadzie efektu piezoelektrycznegoefektu piezoelektrycznego. Aby to dobrze zrozumieć, wyobraźmy sobie prostopadłościan oraz kulkę poruszającą się swobodnie w jego wnętrzu – jak na poniższym rysunku.

Ściany tego prostopadłościanu wykonane są z piezoelektrycznych kryształów. Gdy go przechylimy, kula jest zmuszona do przemieszczenia się w kierunku nachylenia pod wpływem siły ciężkości. Siła, z jaką kula zderza się ze ścianą prostopadłościanu, tworzy prąd elektryczny. Są tu trzy pary ścianek - każda para odpowiada osi w przestrzeni 3D: X, Y i Z. W zależności od prądu wyprodukowanego ze ścian, możemy określić kierunek nachylenia oraz jego wychylenie.
Jak działa żyroskop?
Żyroskopy działają na zasadzie efektu Coriolisa, zwanego też siłą Coriolisa. Wyobraźmy sobie, że kryształy są w ciągłym ruchu tam i z powrotem. Odbywa się to w miejscu, za pomocą piezoelektrycznych kryształów. Za każdym razem, gdy spróbujemy przechylić ten układ, kryształy doświadczają sił w kierunku nachylenia. Dzieje się tak na skutek bezwładności ruchomego kryształu. W ten sposób kryształy wytwarzają prąd, a prąd ten jest wzmacniany przez mikrokontroler.
Podłączenie MPU6050 do Arduino Uno
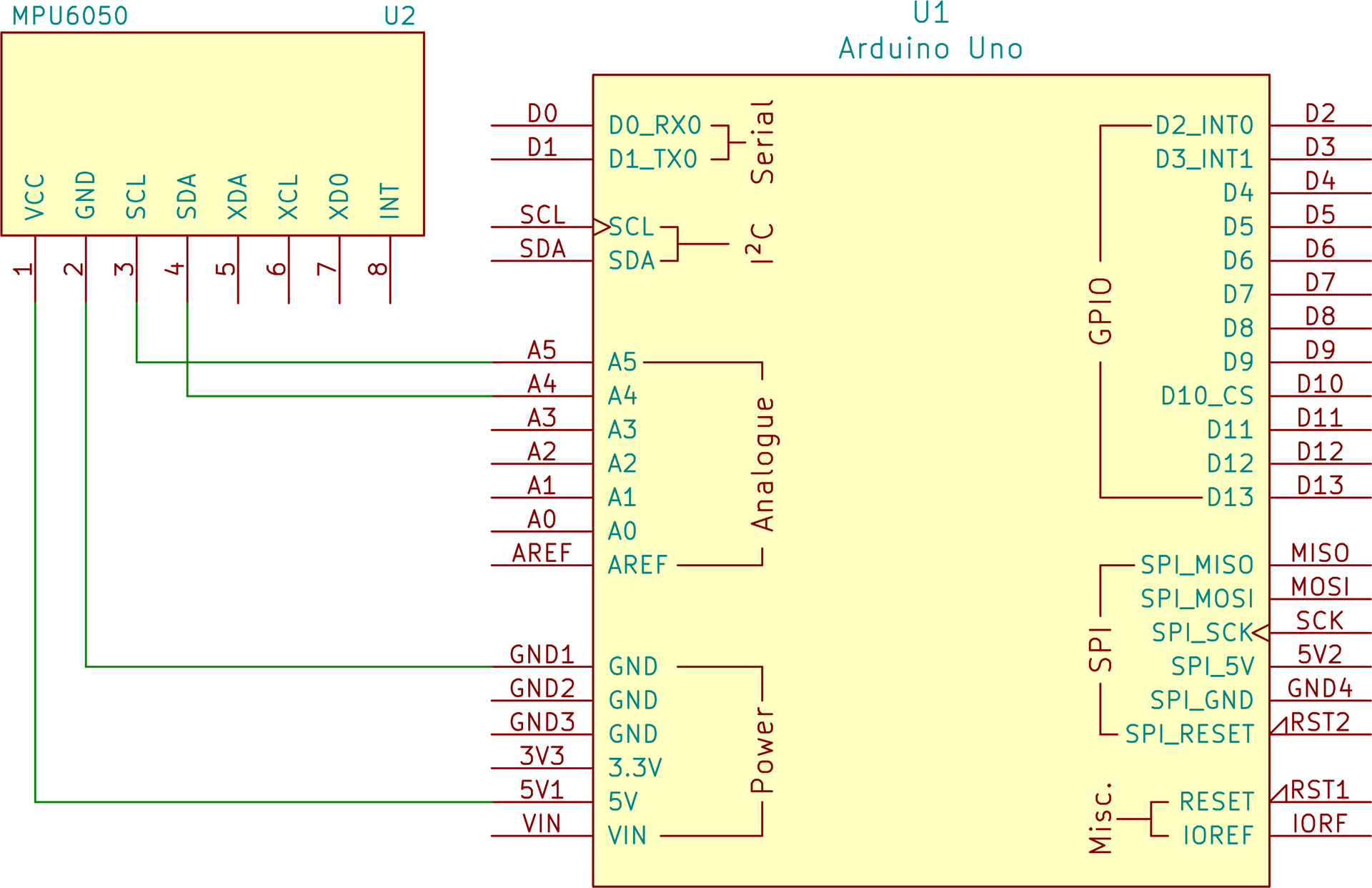
Układ MPU6050 komunikuje się z naszą płytką za pomocą magistrali I2C. Dzięki temu możemy podłączyć czujnik za pomocą czterech przewodów.
Połączenie modułu widzimy na poniższym schemacie ideowym.
Do działania żyroskopu MPU6050 potrzebna nam będzie biblioteka:
Przycisk do pobrania pliku archiwalnego ZIP z plikami projektowymi.
Po pobraniu biblioteki należy ją zainstalować w Arduino IDE.
Słownik
efekt polegający na pojawieniu się w piezoelektryku polaryzacji wywołanej przez przyłożone naprężenie