Przeczytaj
Warto przeczytać
„Pojedynczy pomiar, to nie pomiar ...”
Powiedzenie to znane jest wśród metrologów, którzy wiedzą, że wynik pomiaru to nie tylko wartość mierzonej wielkości podana z odpowiednią jednostką. Wynik pomiaru, aby był użyteczny i wiarygodny, musi być podany razem z niepewnością pomiarowąniepewnością pomiarową, a pojedynczy pomiar tego nie zapewnia.
Przedmiotem pomiaru jest nieznana „wartość prawdziwa”, której pomiar może być obarczony różnymi „błędamibłędami” (Rys. 1.). Błędy, które mogą zmieniać się przy powtarzaniu pomiaru, to „błędy przypadkowe”. Ten sam błąd, który towarzyszy wszystkim pomiarom, to „błąd systematyczny”. Jest też możliwe, że któryś z pomiarów da wynik kompletnie inny od pozostałych. Może to być „błąd gruby”, czyli pomyłka. Każdy z tych rodzajów błędów ma inny wpływ na wynik pomiarów i wymaga innej reakcji wykonującego pomiar (zob. materiały pt. Błąd przypadkowy, błąd systematyczny oraz Jakie mogą być źródła niepewności pomiarowych?).

Podstawowe zasady wykonywania pomiarów i szacowania ich niepewności są następujące:
Zawsze powtarzamy pomiar w sposób możliwie niezależny i dopiero potem podejmujemy decyzję, co będzie podstawą szacowania niepewności.
Jeśli wyniki niezależnych pomiarów tej samej wielkości różnią się, to wykonujemy serię pomiarów, wyliczamy wartość średnią i jej niepewność standardową. Taki sposób wyznaczania niepewności nazywamy „metodą typu A” (sposób wyznaczania tej niepewności został pokrótce opisany w dalszej części tego materiału).
Jeśli przy tym okazuje się, że wynik któregoś z pomiarów znacząco odbiega od pozostałych, to sprawdzamy tego przyczynę. Jeśli jest to rezultat pomyłki lub innej przyczyny niezwiązanej z badanym procesem (tzw. błąd gruby), to eliminujemy ten pomiar przy liczeniu wartości średniej. Jeśli okazuje się, że jest to nowe nieoczekiwane zjawisko, to badamy je szczegółowo - Nobel czeka.
Jeśli kilkakrotnie wykonany pomiar daje ten sam wynik, to znaczy, że w naszych warunkach pomiarowych nie rejestrujemy efektów o charakterze przypadkowym, które zawsze występują w pomiarach. Dzieje się tak wtedy, gdy efekty te są niewielkie, albo przyrząd pomiarowy jest mało na nie czuły. W takim przypadku niepewność pomiaru szacujemy na podstawie informacji o dokładności stosowanych urządzeń pomiarowych, wykorzystujemy własne umiejętności poprawnego wykonania pomiarów, bierzemy pod uwagę własności obiektu mierzonego, stabilności warunków zewnętrznych itd. Wszystko to stanowi podstawę „metody typu B” (metoda ta została pokrótce opisana w dalszej części tego materiału).
Na podstawie tego wszystkiego wyznaczamy niepewność całkowitą, która zawiera w sobie składowe wyznaczone metodą A i metodą B.
Jeśli jedna ze składowych jest zaniedbywalnie mała w stosunku do drugiej, to może być pominięta przy wyznaczaniu niepewności całkowitej.
Szacowanie niepewności metodą A
Niepewność standardowa pomiaru typu A, oznaczana jako , to niepewność obliczona z rozrzutu statystycznego pomiarów, które zostały wykonane w serii pomiarów powtarzalnych.
Kiedy stwierdzamy, że wyniki niezależnych pomiarów tej samej wielkości różnią się, to wykonujemy serię pomiarów. Metoda ta ma zastosowanie wtedy, gdy podczas wykonywania pomiarów występują błędy przypadkowe. Liczba pomiarów w serii zależy od decyzji wykonującego pomiar. Im większa jest ta liczba, tym mniejsza niepewność wyniku.
I tak, za wynik serii pomiarów powtarzalnych wielkości fizycznej przyjmuje się średnią arytmetyczną:
Rozrzut wyników pomiaru powtarzalnego charakteryzuje się przy pomocy wielkości zwanej odchyleniem standardowym:
a niepewność standardową typu A tego wyniku oblicza się ze wzoru na odchylenie standardowe średniej:
Wzory (1) i (3) oraz przykłady ich stosowania zostały dokładnie omówione w materiale pt. Wynik serii pomiarów powtarzalnych i jego niepewność standardowa, do przeczytania którego gorąco Cię zachęcamy.
Szacowanie niepewności metodą B
Niepewność standardowa pomiaru typu B, oznaczana jako , to niepewność obliczona inną drogą niż z rozrzutu wyników.
Z reguły, metoda szacowania niepewności typu B sprowadza się do określania niepewności wynikających ze skończonej dokładności przyrządów pomiarowych. Przyrząd pomiarowy powinien gwarantować taką dokładność, aby wynik pomiaru różnił się od rzeczywistej wartości mierzonej wielkości nie więcej niż o działkę elementarną przyrządu (dolny indeks 'p' - jak 'przyrząd' - został użyty po to, by zaznaczyć, jakie jest źródło tej niepewności).
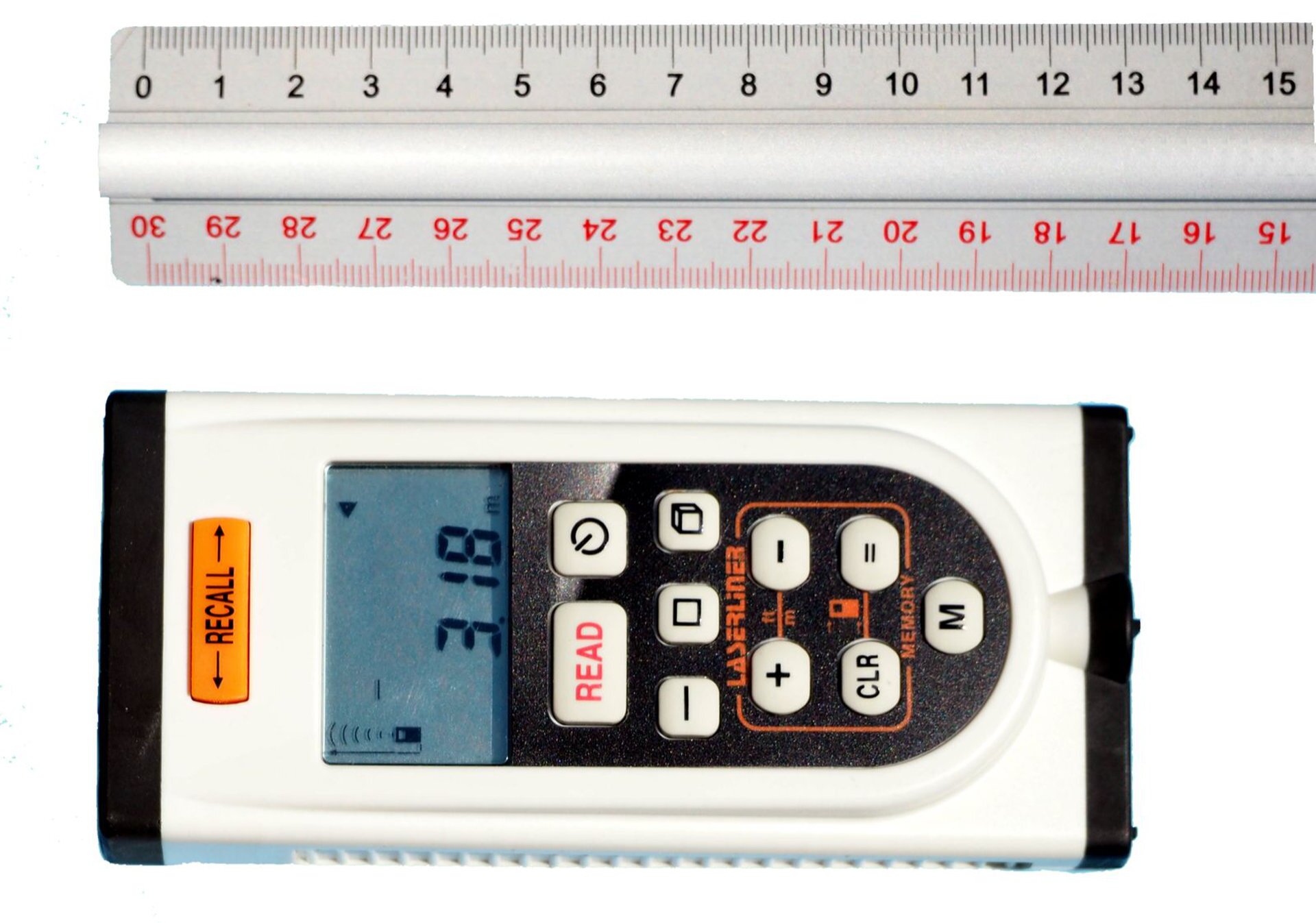
W przypadku prostych przyrządów mechanicznych (tj. linijka milimetrowa, suwmiarka, termometr, waga szalkowa) działka elementarna odpowiada odstępowi sąsiadujących kresek podziałki (odpowiednio: dla linijki milimetrowej, dla suwmiarki, dla termometru alkoholowego i dla wagi szalkowej). Dla przyrządów cyfrowych działka elementarna odpowiada jednostce dekady wskazującej najmniejszą wartość (Rys. 2.). Należy przy tym pamiętać, że w niektórych przyrządach dokładność może być też określona przez producenta w inny sposób (np. dla mierników elektromagnetycznych często zdarza się, że niepewność tę można wyznaczyć ze wzoru: , gdzie jest „klasąklasą” przyrządu, a „zakres” oznacza największą możliwą wartość, jaka można zmierzyć przy jego użyciu.
Niekiedy, oprócz niepewności przyrządu pomiarowego do niepewności pomiarowej typu B dodaje się również tzw. niepewność eksperymentatora . Jest ona określana przez osobę wykonującą pomiar, a jej wartość szacowana jest na podstawie umiejętności eksperymentatora i sposobu wykonywania pomiarów. Na przykład, podczas pomiaru czasu stoperem mechanicznym o dokładności , niepewność związana z reakcją eksperymentatora wynosi ok. . Obydwie niepewności są od siebie niezależne i aby uzyskać niepewność graniczną pomiaru czasu należy je do siebie dodać, tj. .
We wszystkich powyższych przypadkach wartość traktujemy jak niepewność granicznąniepewność graniczną (zwaną też niepewnością maksymalną) mierzonej wielkości . Innymi słowy zakładamy, że odchylenie wyniku pomiaru od wartości rzeczywistej nie wykracza poza przedział , gdzie
a z prawdopodobieństwem równym 0,68 mieści się w przedziale , gdzie
Posługiwanie się wielkością zamiast ułatwia porównywanie niepewności pomiarowych typu B z niepewnościami typu A, do których stosuje się tę samą zasadę 68% (Rys. 3.).

Obliczanie niepewności całkowitej
Jeśli niepewność jest porównywalna z niepewnością , to całkowita niepewność pomiaru powinna uwzględniać oba typy niepewności.
Znając niepewności standardowe wynikające z błędów przypadkowych pomiaru, czyli , oraz błędów systematycznych, związanych m.in. z użytymi przyrządami pomiarowymi, czyli , standardową niepewność całkowitą wyznaczamy ze wzoru:
W obliczeniach często pomija się dolny indeks 'c' pisząc po prostu zamiast
Oczywiście, jeśli jedna z tych niepewności jest dużo większa, np. o rząd wielkości, od drugiej, to tę drugą można pominąć i za niepewność całkowitą przyjąć tę, która ma wartość dominującą.
Prawidłowy zapis wyniku pomiaru
Wynik pomiaru zawsze należy podawać razem z niepewnością standardową pomiaru i wyrażać w tych samych jednostkach co niepewność (najlepiej w jednostkach podstawowych układu SI).
Zapis wyniku najlepiej zacząć od prawidłowego zapisu niepewności pomiarowej, ponieważ niepewność zaokrągla się do dwóch cyfr znaczących, a wynik pomiaru zapisuje się z dokładnością określoną przez prawidłowy zapis niepewności. Oznacza to, że ostatnia cyfra wyniku pomiaru i jego niepewności muszą stać na tym samym miejscu dziesiętnym. Zaokrąglanie niepewności i wyniku odbywa się zgodnie z zasadami zaokrągleń obowiązującymi w matematyce: cyfry 0‑4 zaokrągla się w dół (poprzedzająca je cyfra nie ulega zmianie), natomiast cyfry 5‑9 zaokrągla się w górę (cyfrę poprzedzającą zwiększa się o jeden).
Poniżej podano kilka przykładowych, poprawnych zapisów tego samego wyniku pomiaru:
,
,
.
Ostatni zapis jest powszechnie stosowany w publikacjach naukowych i danych katalogowych, dlatego jest on najbardziej zalecany. Na koniec, zanim przejdziemy do przykładu, przypomnijmy jeszcze, że stosowany powszechnie (i niestety nie zawsze poprawnie) zapis niepewności pomiarowej przy użyciu symbolu odnosi się tylko do niepewności granicznej. Innymi słowy zapis wyniku pomiaru postaci:
wcale nie oznacza, że niepewność standardowa wynosi . Oznacza on, że niepewność graniczna tego pomiaru jest równa .
Przykład 1.
1. Co i w jaki sposób zmierzono?
Równoległa wiązka promieni świetlnych padająca na soczewkę, po przejściu przez nią, może skupić się w punkcie zwanym ogniskiem. Taką soczewkę nazywamy skupiającą (Rys. 4.).
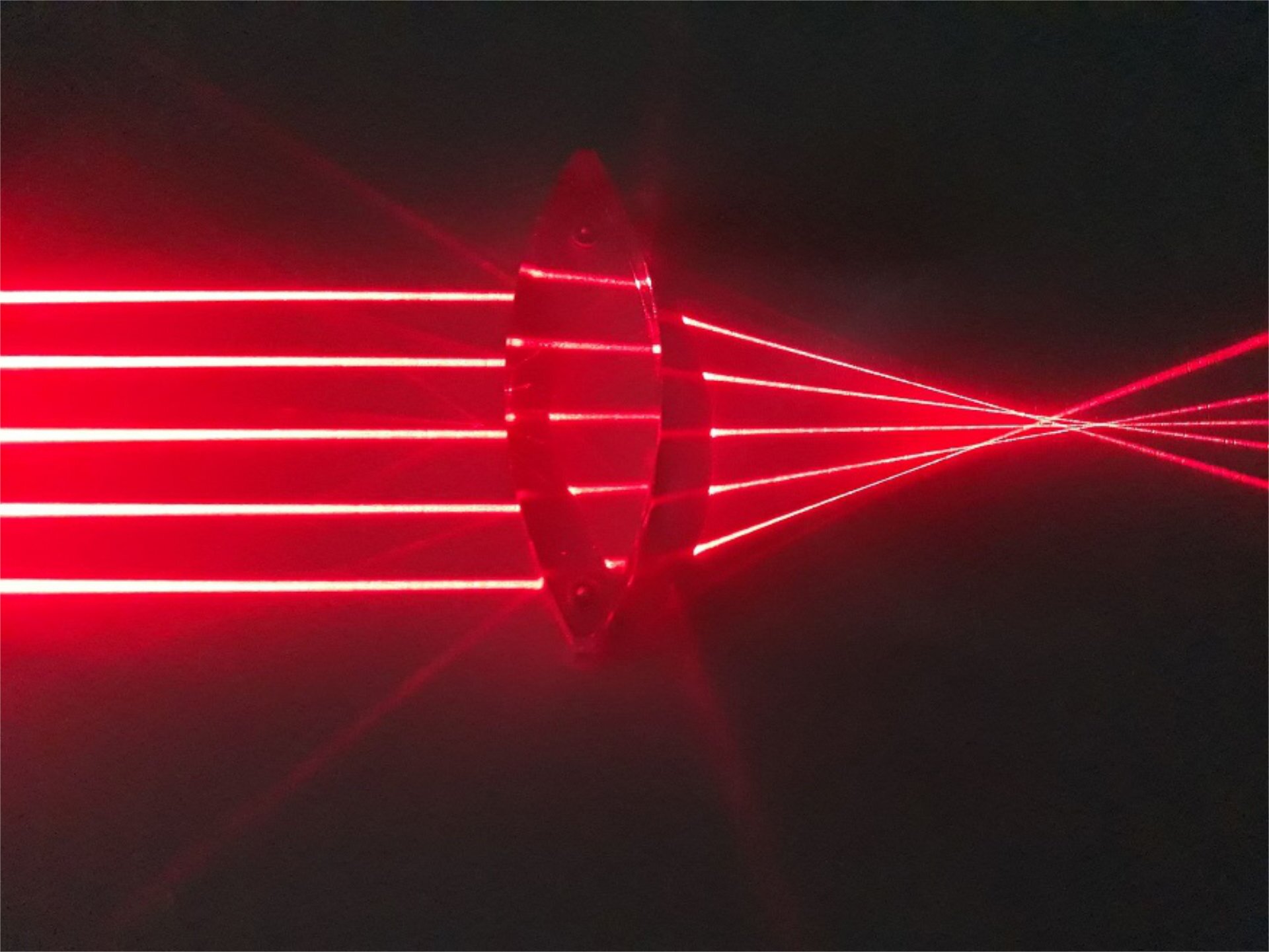
Odległość między płaszczyzną soczewki, a ogniskiem nazywamy ogniskową . Cechą soczewek rzeczywistych jest zależność długości ogniskowania promieni świetlnych od ich położenia pomiędzy środkiem a brzegiem soczewki (tzw. aberracja sferyczna). Jej efekt, widoczny na Rys. 4., sprawia, że trudno jest określić precyzyjnie wartość .
W tym przykładzie zmierzymy wartość ogniskowej soczewki wykonując pomiarów ogniskowej. W każdym pomiarze oświetlimy fragment soczewki wiązką laserową, a następnie przesuwając ekran znajdujący się po drugiej stronie soczewki odszukamy punkt, w którym plamka lasera jest najmniejsza. Wartość odległości między soczewką a ekranem zmierzymy linijką o podziałce milinetrowej.
2. Seria pomiarowa
Wyniki pomiarów w milimetrach [mm], podane w przypadkowej kolejności, to:
56, 54, 54, 57, 53, 54, 55, 56, 55, 52, 58, 53, 51, 52, 55, 54, 54, 55, 53, 63.
3. Histogram
HistogramHistogram, który przygotowano na podstawie zebranych pomiarów cząstkowych, przedstawiono na Rys. 5. (zob. materiał pt. Co to takiego histogram?).

Jak widać, jeden z pomiarów znacząco odbiega od pozostałych. Jego przyczyną może być nieusunięte zabrudzenie (okruch, tłuszcz, owad, itp.) znajdujące się na fragmencie soczewki. Uznajemy ten pomiar za błąd gruby i eliminujemy z dalszych obliczeń. Mamy zatem pomiarów.
4. Wynik pomiaru - średnia arytmetyczna
Obliczona ze wzoru (1), średnia z wykonanych pomiarów wynosi:
Powyższy wynik, podany z dokładnością do dziesięciotysięcznych części milimetra, wygląda nieco dziwacznie. Zaokrąglimy go dopiero wtedy, gdy wyznaczymy niepewność standardową pomiaru.
5. Odchylenie standardowe serii pomiarów - niepewność standardowa typu A
Niepewność wartości (7) wyznaczamy ze wzoru (3):
6. Dokładność przyrządu i niepewność eksperymentatora - niepewność standardowa typu B
Niepewność graniczną naszego przyrządu jest działka elementarna linijki . Chcąc oszacować niepewność eksperymentatora powinniśmy wziąć pod uwagę jego ostrość widzenia (właściwą metodą byłoby zaproszenie do eksperymentu wielu eksperymentatorów i porównanie średnich ogniskowych uzyskanych przez każdego z nich). Korzystając z tzw. równania soczewki (więcej na ten temat przeczytasz w materiale Badamy związek między ogniskową soczewki a położeniem przedmiotu i obrazu) można przyjąć, że wada wzroku 0,25 dioptrii skutkować będzie przesunięciem ostrej plamki na ekranie w odległości 10 cm od oka obserwatora o wartość .
Niepewność graniczna wyniesie zatem
a niepewność standardowa typu B
7. Niepewność całkowita i końcowy wynik
Standardową niepewność całkowitą wyznaczamy ze wzoru (6) i zaokrąglamy do dwóch cyfr znaczących:
a ostateczny wynik zapisujemy następująco:
Słowniczek
(ang.: measurement error) - odstępstwo wyniku jednostkowego pomiaru od prawdziwej wartości mierzonej wielkości fizycznej, której na ogół nie znamy. Należy zwrócić uwagę na to, że znaczenie pojęcia „błąd pomiaru” jest jakościowe. Ilościową miarą błędów pomiarowych są niepewności pomiarowe (granicznegraniczne i standardowestandardowe).
(ang.: histogram) - jeden z najbardziej popularnych wykresów statystycznych, służący do przedstawienia liczebności danych (np. pomiarowych) w zadanych przedziałach badanej zmiennej.
(ang.: accuracy class of measuring device) określa wartość błędu maksymalnego, jaki może wystąpić podczas pomiaru wykonywanego danym przyrządem.
zwana dawniej niepewnością maksymalną - niepewność pomiaru wielkości fizycznej , oznaczana symbolem , związana z rozdzielczością i dokładnością przyrządu pomiarowego.
(ang.: uncertainty of measurement) zwana również niepewnością standardową - niepewność pomiaru wielkości fizycznej , oznaczana symbolem , związana z rozrzutem wyników, które można uzyskać w serii niezależnych pomiarów, dokonanych w powtarzalnych warunkach. W przypadku pomiarów bezpośrednich mamy dwa rodzaje niepewności standardowych: niepewność typu A (wyznaczoną w oparciu o statystyczne metody opracowania wyników) i niepewność typu B (wyznaczoną w oparciu o naukowy osąd badacza wykonującego pomiary i biorącego pod uwagę dostępne informacje nt. rozdzielczości przyrządów pomiarowych, wyniki poprzednich pomiarów itd.).